i use the code from instructable.com and just little edited by me.
this is the code
Blockquote
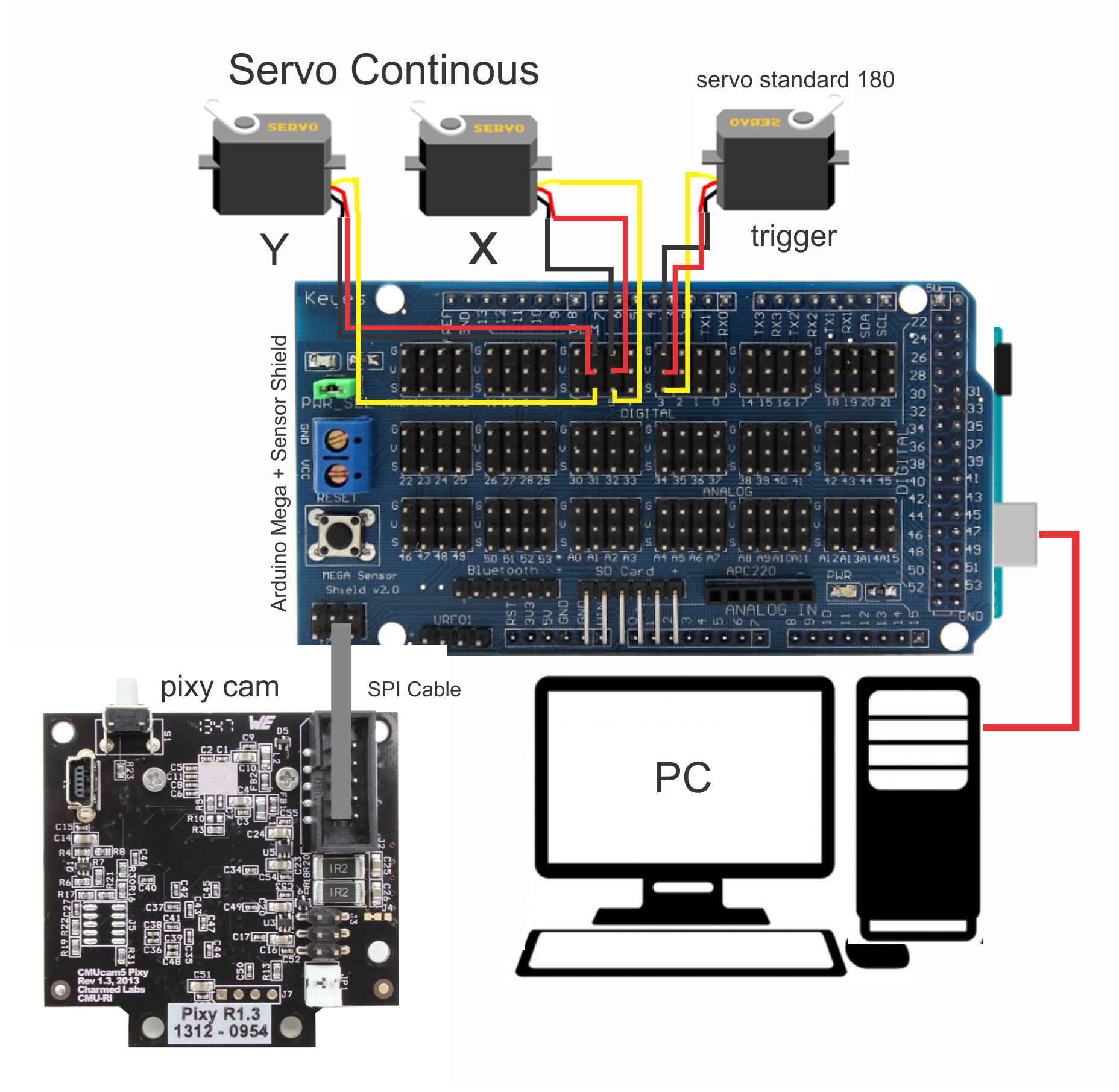
- GND - Pixy Black Wire
- VCC 5V - Pixy Red Wire
- DIO 3 - Trigger Servo (180 Servo)
- DIO 5 - Pan Servo (Servo continous)
- DIO 6 - Tilt Servo (Servo continous)
- DIO 10 - OPTIONAL: RobotGeek Laser White -‘S’ Black -‘G’
- DIO 11 - Pixy Yellow Wire
- DIO 12 - Pixy Brown Wire
- DIO 13 - Pixy Orange Wire
-
- Use an external power supply and set the jumper for pins 3/5/6 to ‘VIN’, 9/10/11 to ‘5V’
-
-
- For more information and wiring diagrams see
-
http://learn.robotgeek.com/getting-started/29-desktop-roboturret/159-robotgeek-foam-dart-gun-getting-started-guide.html
***********************************************************************************/
#include <SPI.h> //Serial Peripheral Interface for connecting to Pixy
#include <Pixy.h> //Pixy Communication library
#include <Servo.h> //include the servo library to control the RobotGeek Servos
Pixy pixy; //create the pixy class
//Constant variables - these all use ‘const’ because they will not change during the program operation, allowing us to save RAM
const int TRIGGER_PIN = 3; //Trigger Servo Digital Pin
const int PAN_PIN = 5; //Pan Servo Digital Pin
const int TILT_PIN = 6; //Tilt Servo Digital Pin
//max/min puse values in microseconds to send to the servo
const int FIRE_POSITION = 1000; //default position in microseconds the servo will move to in order to fire the dart gun
const int PAN_MIN = 600; //full counterclockwise for RobotGeek 180 degree servo
const int PAN_MAX = 2400; //full clockwise for RobotGeek 180 degree servo
const int TILT_MIN = 600; //full counterclockwise for RobotGeek 180 degree servo
const int TILT_MAX = 2400; //full clockwise for RobotGeek 180 degree servo
const int TRACKING_TIMEOUT = 50; //time in milliseconds after object is lost that tracking stops
const int TIME_BFORE_FIRE = 3000;//time in milliseconds between first seeing the object and firing
int speed = 5; //alter this value to change the speed of the system. Higher values mean higher speeds 5-500 approximate recommended range
Servo panServo, tiltServo, triggerServo; // create servo objects to control the pan and tilt servos
int panValue = 1200; //current positional value being sent to the pan servo.
int tiltValue = 1200; //current positional value being sent to the tilt servo. makin tinggi makin merunduk
int triggerValue = 1500; //current positional value being sent to the tilt servo.
int pixyCenterY; //y coordinate of the block, centered
int pixyCenterX; //x coordinate of the block, centered
long pixySize; //size of the block
long lastSeen; //last time the pixy block was located
long trackStartTime; //time that tracking started
bool tracking = true; //whether or not the code is currently tracking an object
bool shots = 3; //number of shots remaing - by default 1 for the foam dart gun
//setup servo objects and set initial position
void setup()
{
panServo.attach(PAN_PIN, PAN_MIN, PAN_MAX); // attaches/activates the pan servo on pin PAN_PIN and sets lower/upper limits that can be sent to the servo
tiltServo.attach(TILT_PIN, TILT_MIN, TILT_MAX); // attaches/activates the tilt servo on pin TILT_PIN and sets lower/upper limits that can be sent to the servo
triggerServo.attach(TRIGGER_PIN); //attach the trigger servo on pin SERVOPIN
//the pixy class will initialize all of the pixy realated pins
//write initial servo positions to set the servos to ‘home’
panServo.writeMicroseconds(panValue); //sets the pan servo position to the default ‘home’ value
tiltServo.writeMicroseconds(tiltValue);//sets the tilt servo position to the default ‘home’ value
triggerServo.writeMicroseconds(triggerValue); //sets the servo position to 90 degress, centered, ‘home’ value
Serial.begin(9600);
Serial.print(“Starting…\n”);
pixy.init();
}
void loop()
{
uint16_t blocks; //block holds tracked data for the pixy
char buf[32]; //pixy data buffer
blocks = pixy.getBlocks();
//if blocks exist
if(blocks)
{
lastSeen = millis(); //a block has been ‘seen’ so record the time
//if the code wasn't tracking before
if(tracking == false)
{
trackStartTime = lastSeen; //record tracking time start - this will be the same as lastSeen right now, but lastSeen will keep updated
tracking = true; //turn tracking flag on
Serial.println("Start Tracking! Time");
Serial.println(trackStartTime);
}
pixyCenterX = 160 - pixy.blocks[0].x ; //get x data (0-320) and center it by subtracting 160. Values 0-159 (to the left) will be negative while values 161-320 (to the right) will be positive. This will help in tracking objects
pixyCenterY = pixy.blocks[0].y - 100; //get y data (0-200) and center it by subtracting 100. Values 0-99 (down) will be negative while values 101-200 (up) will be positive. This will help in tracking objects
pixySize = pixy.blocks[0].height * pixy.blocks[0].width; //get the relative size of the object by multiplying width * height
panValue = panValue + pixyCenterX/speed;
tiltValue = tiltValue + pixyCenterY/speed;
//even though the servos have min/max value built in when servo.attach() was called, the program must still keep the
//panValue variable within the min/max bounds, or the turret may become unresponsive
panValue = max(panValue, PAN_MIN); //use the max() function to make sure the value never falls below PAN_MIN (0 degrees)
panValue = min(panValue, PAN_MAX); //use the min() function to make sute the value never goes above PAN_MAX (180 degrees)
//even though the servos have min/max value built in when servo.attach() was called, the program must still keep the
//tiltValue variable within the min/max bounds, or the turret may become unresponsive
tiltValue = max(tiltValue, TILT_MIN);//use the max() function to make sure the value never falls below 0
tiltValue = min(tiltValue, TILT_MAX);//use the min() function to make sute the value never goes above 180
panServo.writeMicroseconds(panValue); //sets the pan servo position to the default 'home' value
tiltServo.writeMicroseconds(tiltValue);//sets the tilt servo position to the default 'home' value
//if the object has been tracked for at least TIME_BFORE_FIRE millieseconds, and the dart gun has a shot, proceed
if((millis() - trackStartTime > TIME_BFORE_FIRE) && (shots > 0))
{
Serial.print("FIRE!");
triggerServo.writeMicroseconds(FIRE_POSITION); // move the servo to FIRE_POSITION to fire the dart gun / durasi nge trigger nya
delay(300); //wait for 300ms for servo to move
triggerServo.writeMicroseconds(triggerValue); // sets the servo position to 90 degress, centered
shots = shots - 3; //decrement the shot counter so the gun doesn't keep trying to fire / jumlah yg ditembakan
}
}
//if no blocks exist
else
{
//check if it has beeen TRACKING_TIMEOUT milliseconds before setting the tracking flag false - this helps to mitigate lost data packets or short connectiviety losses
if(millis()-lastSeen > TRACKING_TIMEOUT)
{
tracking = false;
Serial.println(“Object Lost, no longer tracking”);
}
}
}

