
Hi, I am in the middle of making a color chasing robot using pixy2.
Unfortunately, pixy2 also detects so many similar colors in the back ground(outdoor) other than the color of my target object.
Is there a solution for this problem?
I need to make my color chasing robot follows only the specific object within its detectable range.
Hello,
Sometimes getting accurate detection is a matter of “tuning”. Please check out this page for some effective ways to improve the detection accuracy:
https://docs.pixycam.com/wiki/doku.php?id=wiki:v2:some_tips_on_generating_color_signatures_2
Edward
Hi Edward
Thank you for your reply.
I tried to follow the tips you provided but it was so hard to get my pixy2 to detect only the object I hold in front of it because I am using it in the outdoor environment, so my pixy2 detects literally any similar color no matter how I try to optimize the settings.
Is there any tips on using some specific bar code(or sign) so that I could get my pixy2 to be worked only with the specific object(or pattern) I hold in front of it?
Hello,
Perhaps it’s the object and it’s lack of hue or over/under exposure (?). Can you share a picture of what you see through Pixymon while trying to track the object(s)?
Edward
Hi Edward
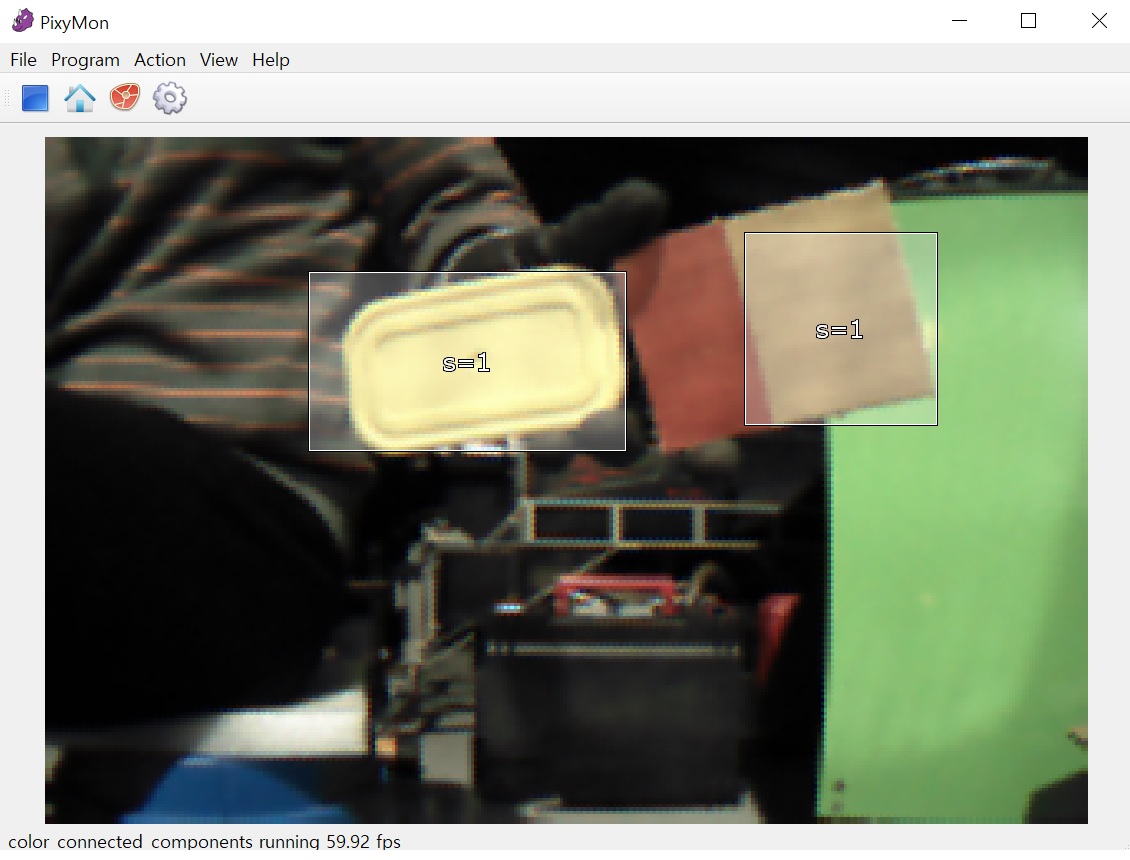
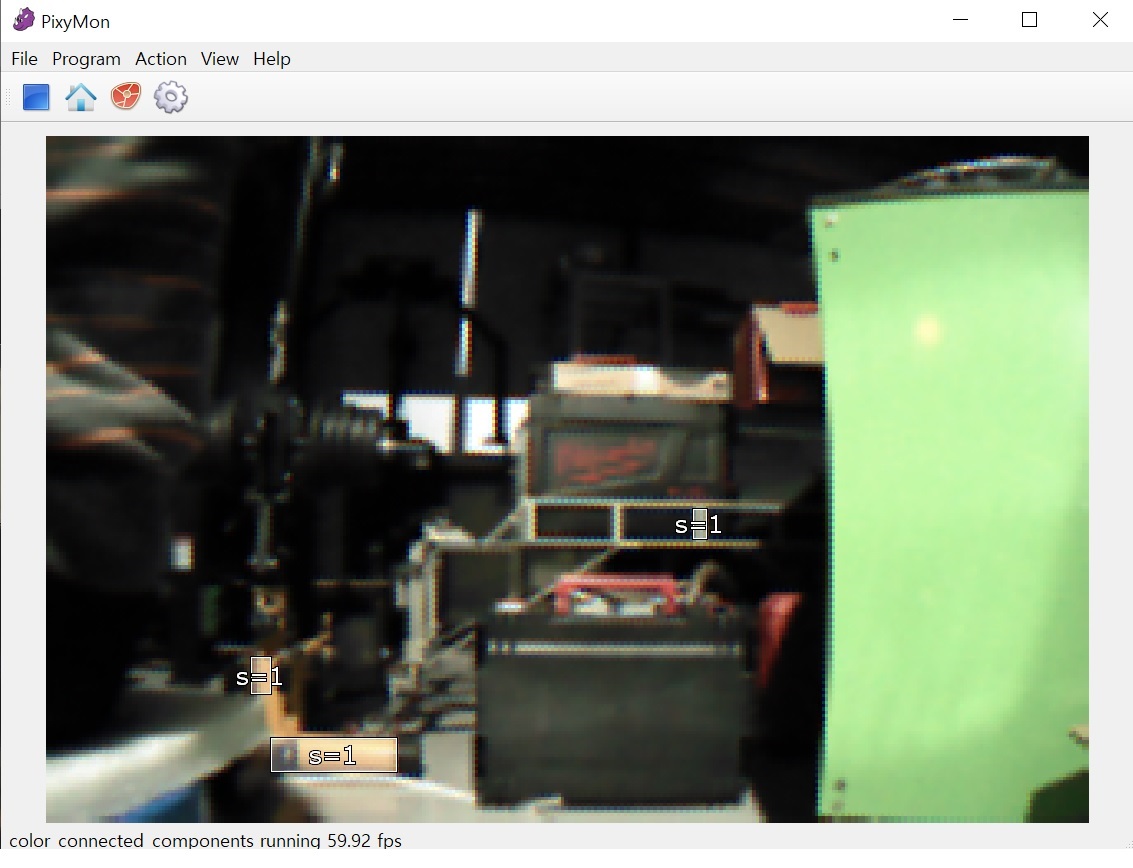
Yes, this is the picture.
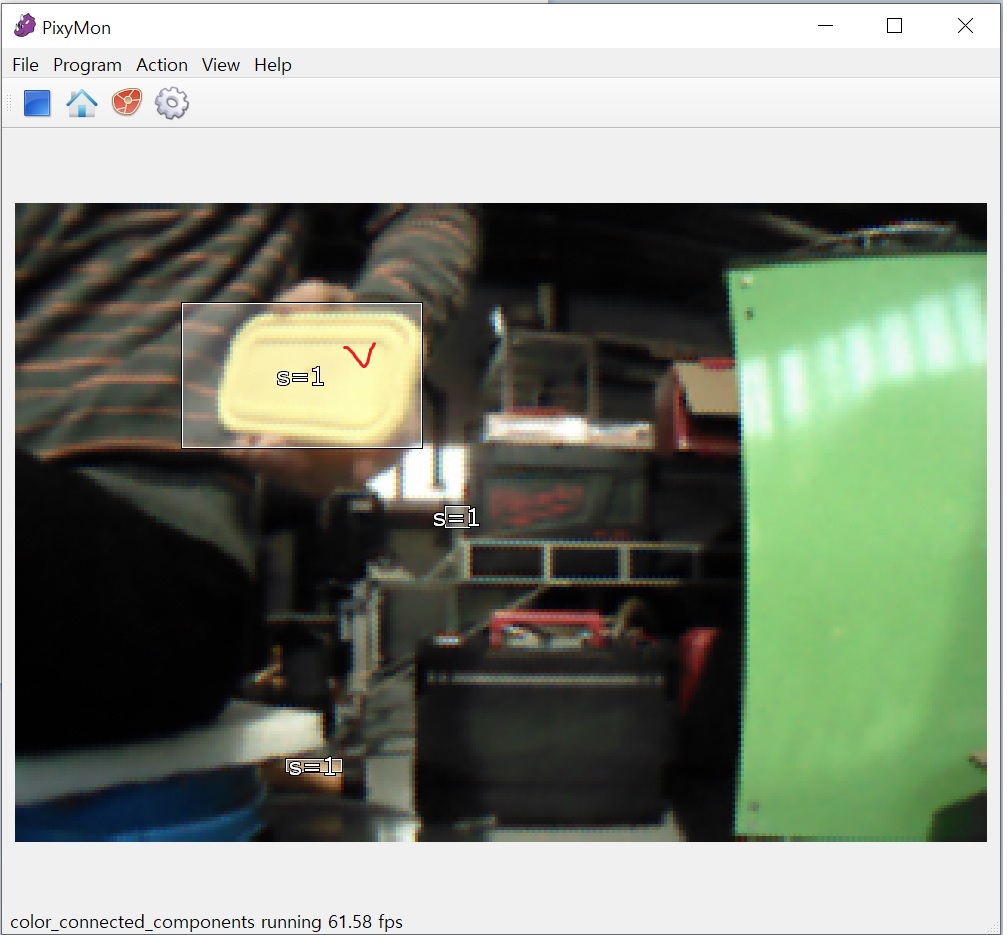
The red marked object is the one that I want my pixy to track but as you can see, other similar objects also detected in the background.
I optimize the settings to find the balance according the tutorial you sent to me but it’s still like this.
Hello,
Unfortunately, for object detection, Pixy is just using color cues, so objects that are close in hue will be detected also. (sorry)
You might be able to filter based on the size of the object, where it’s located in the image, or its aspect ratio (width/height). I don’t know what your constraints are though.
The other idea is to get Pixy to filter based on id number. That is, each object gets an index (m_index) value. If you choose one of the index values, it should be the same object between images. This can be another way to filter the objects.
https://docs.pixycam.com/wiki/doku.php?id=wiki:v2:ccc_api
Edward