I have a python script that allows me to move the pan/tilt servos connected to Pixy2. I want to be able to call get_raw_frame when the user calls for it but I get this error.

I believe this is because when get_raw_frame calls pixy.init() it bugs out since I already called pixy.init() in my original script. Is there any way I can edit the firmware of get_raw_frame to fix this?
Hey @TomPoet, you can edit the code - it’s called get_raw_frame.cpp and should be located in your libpixyusb2 examples directory. Here’s the file on our Github: https://github.com/charmedlabs/pixy2/blob/master/src/host/libpixyusb2_examples/get_raw_frame/get_raw_frame.cpp
You should be able to comment out lines 110 - 134 to remove the Pixy.init and version check sections of code.
Hope this helps!
Cheers,
Jesse
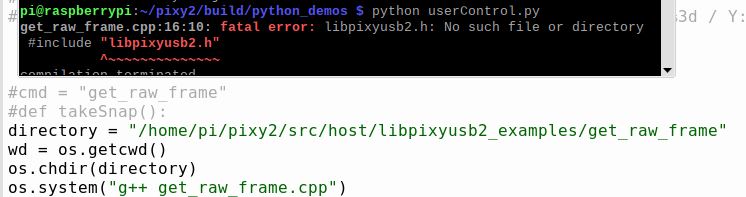
Hi! Thanks for the reply. I tried running that cpp file from my python script through subprocessing but I come up with this error. Is there a way around this?