Hello, completely new here.
*edit: this question is not IRLock specific but is about how the camera process each frame
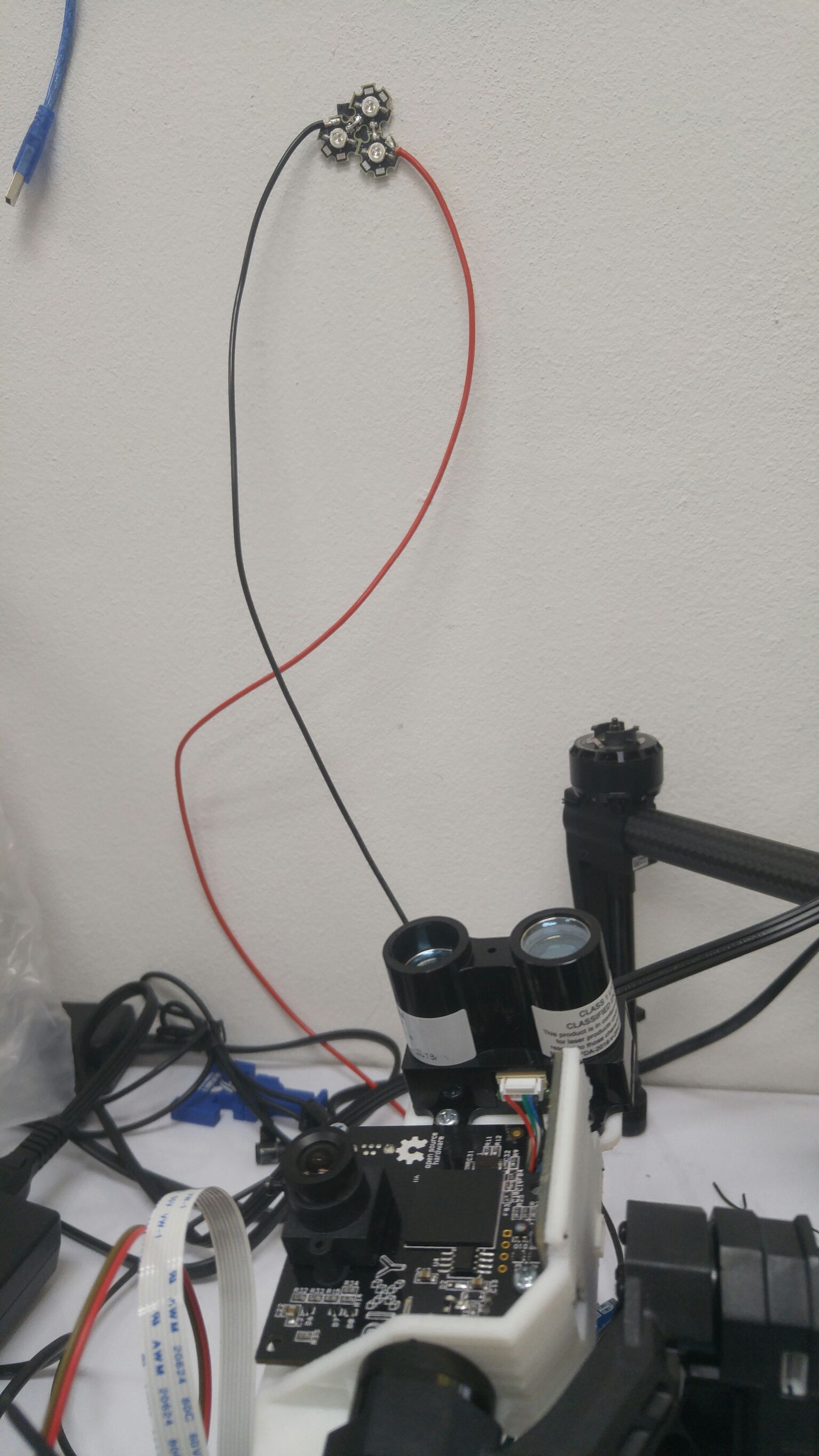
I’m making yet another precision landing system on a drone using IRLock + IRLED(not the beacon) and Garmin Lidar Lite V3, both on same I2C.
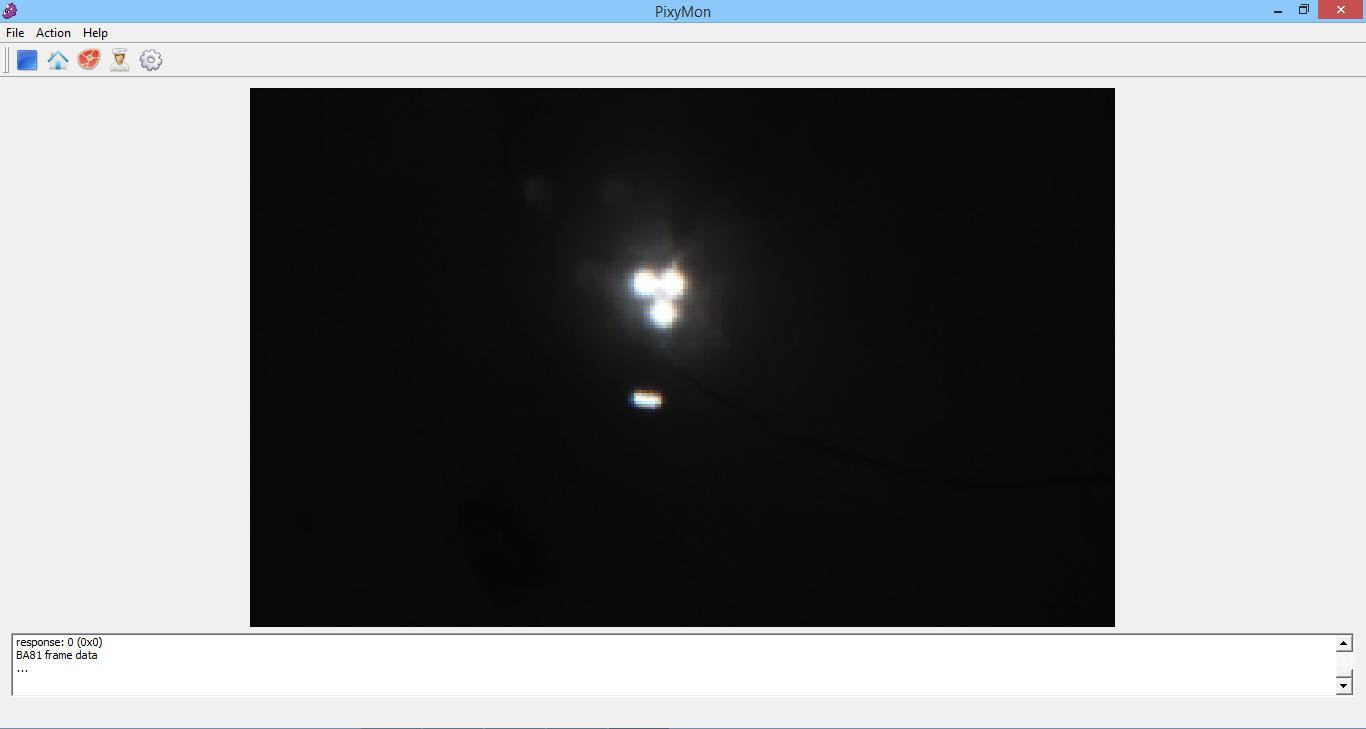
Problem: The Pixy is picking up lidar flashes.
I tried working at 25Hz and discarding half of the frames which I trigger lidar measurement but Pixy still occasionally detect lidar flashes from upto 80cm.
The lidar only flash when commanded and takes less than 10ms.
Tried adjusting timing but still not 100% gon
*both sensors are running on ROS on RPi3
Can I2C possibly lose sync and grab the bad frames? I think I had better result with SPI but I2C is cleaner.
From my understanding, Pixy process each frame and puts data in a buffer waitng to be read which gets flushed/replaced every 20ms(50Hz).
What happens when the data is being read while new data arrive?
Thank you.