
Hey There!
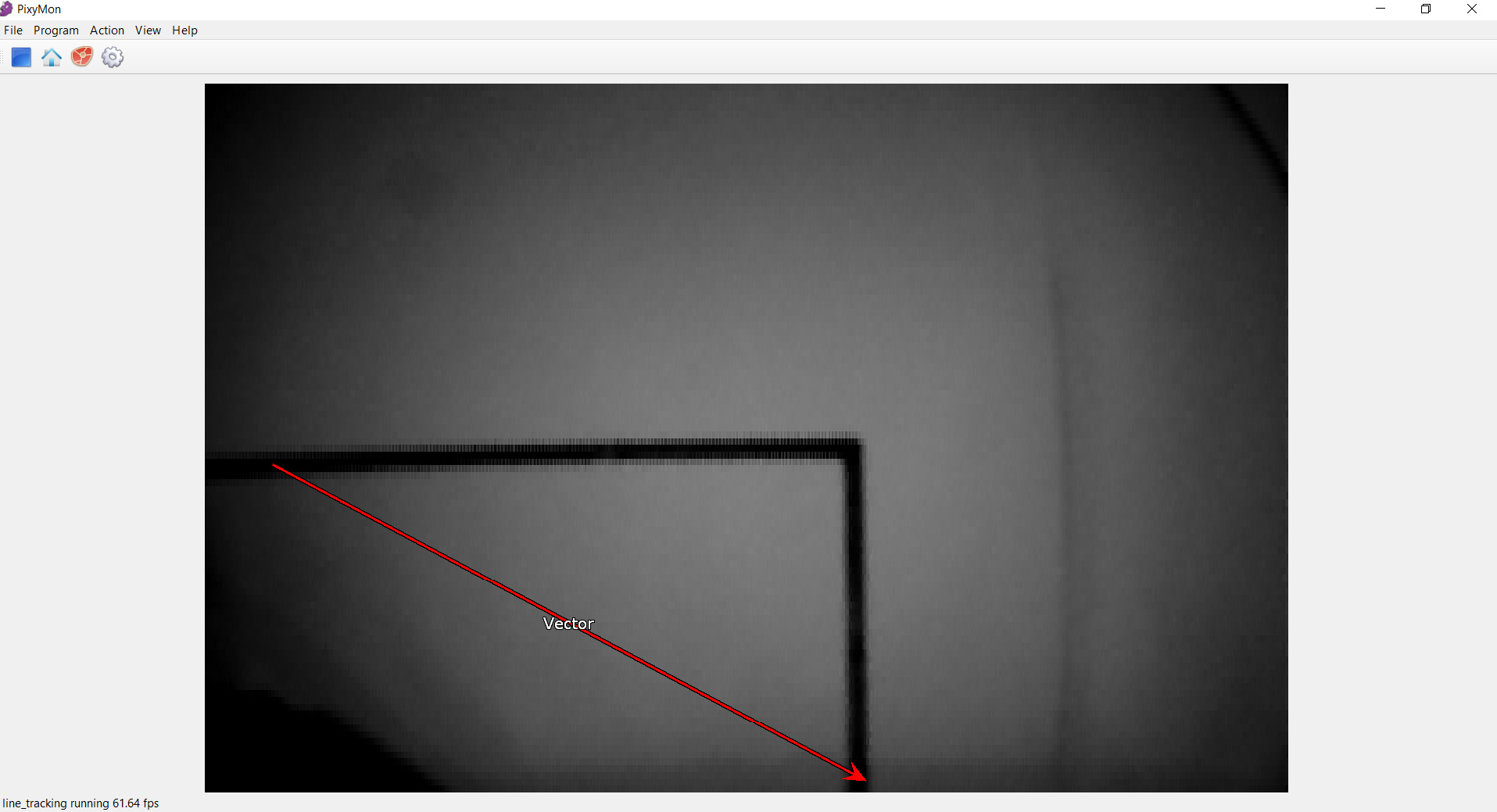
I’m working on line follower robot. During the tests, I’ve realized that when it faces 90º curves the vector points to the wrong direction. It points down, rather than the correct direction.Is it normal behave of the line tracking API or it’s just a problem on the parameters tunning?
Best Regards
S.M