Hello everybody,
I have the following Problem:
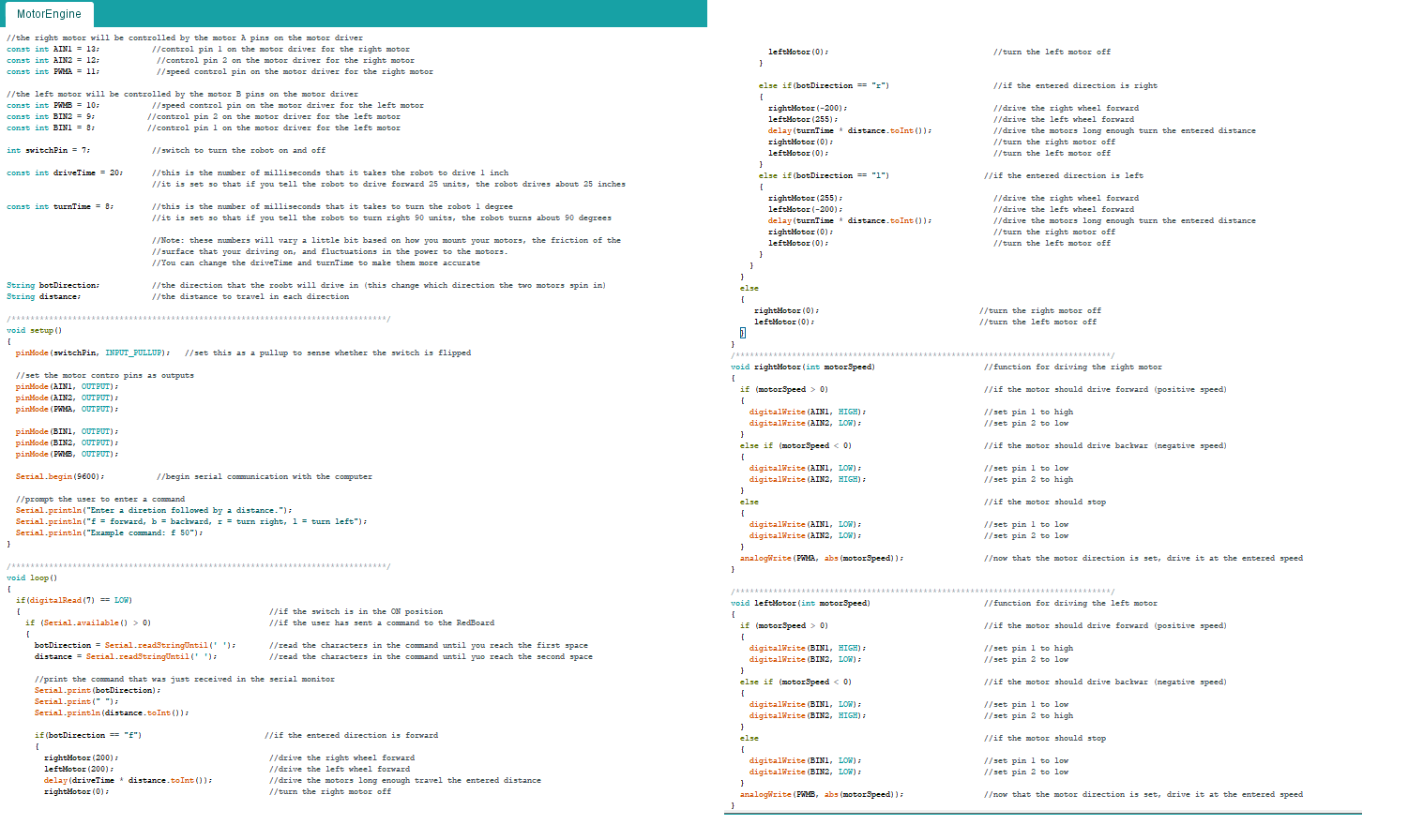
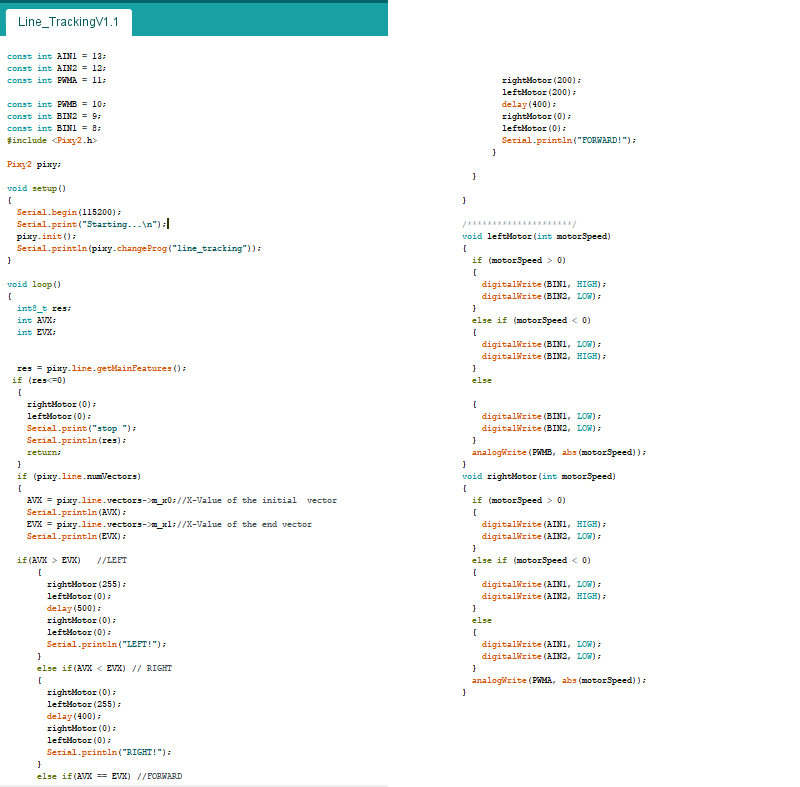
When I start my program I see on the serial console the results of the coordinates of the inital vector and the end vector. And i see in which direction should my robot drive. But the right motor does not drive. If I use only the program for the motor engine, then I can perfectly control both motors, but when I use the command “pixy.init()” or “pixy.changeProg(“line”)”, then i loose the control of the right motor.
In the Attachment you can find my code.
I hope somebody could help me:)
Greeting Sandro!