HI , i am trying to make a line follower using pixy2 as vision of the robo, have done tunning parameters as described in the following links
https://docs.pixycam.com/wiki/doku.php?id=wiki:v2:pixymon_index
https://docs.pixycam.com/wiki/doku.php?id=wiki:v2:pixymon_index#camera-tab
https://docs.pixycam.com/wiki/doku.php?id=wiki:v2:general_api
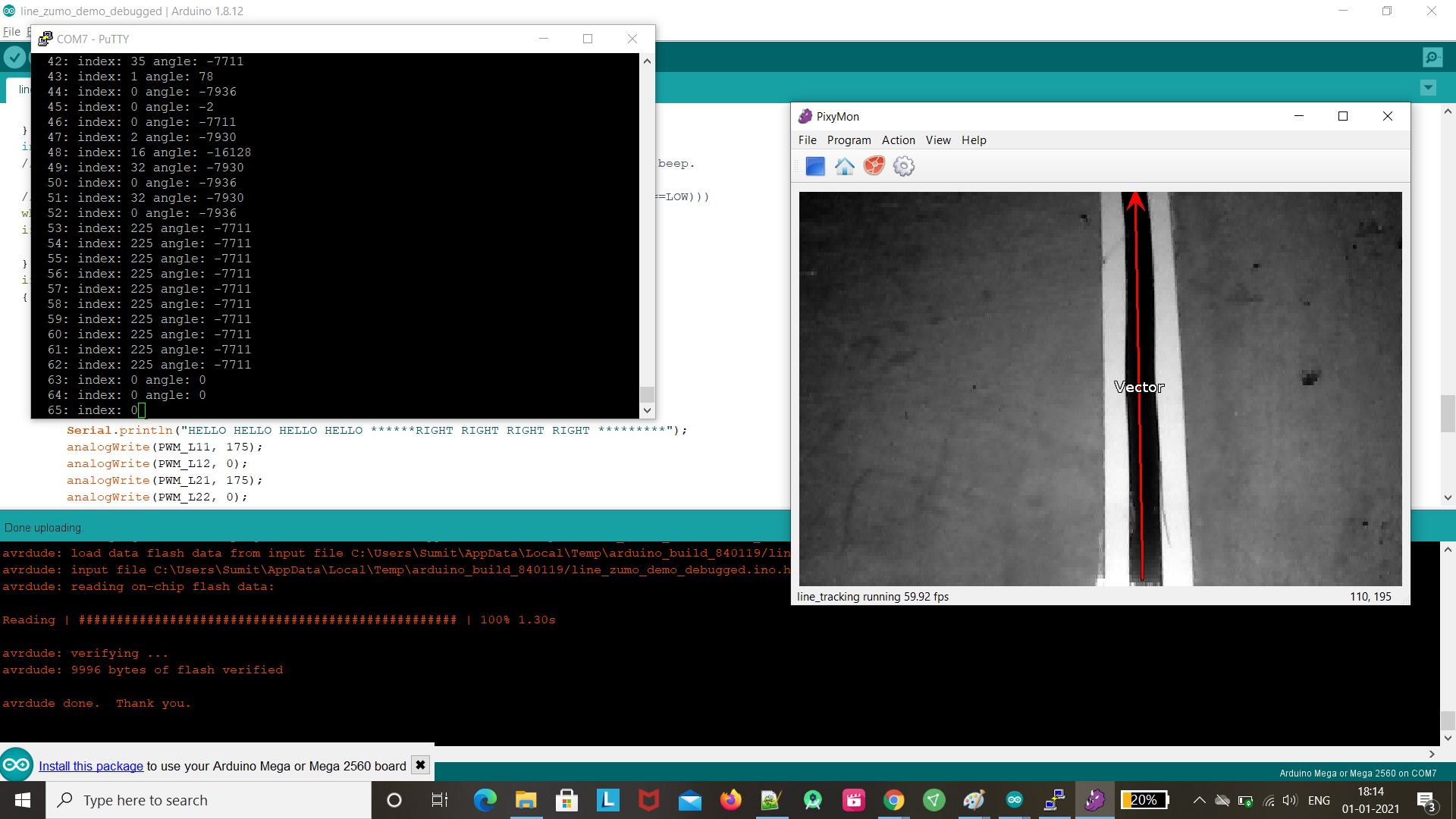
Untill now pixy was working fine and i was getting all the correct data (lines,intersections and barcode ), but one moment pixy2 started getting wired reporting only angles even on straight lines , tried restarting the pixy2 hard mode but same issues continues , have attached the snaps do have a look and suggest.