
Hello, we use pixy2 for line tracking on heavy robot. Robot have to carry cargo and read qr codes. The competition will start after 2 day. Our problem is pixy2 goes wrong way (out of line) in 3 way intersection (t shape) we use setNextTurn(90) command depend on qr code we read before intersection. Its normal until intersection which we will turn left. We watch voltages of our motors and it should be left motor 0.003-1… and right motor 0.07-9… but its othervise. When we stop robot and set the line right of pixy2 its get perfect but when the line at left of pixy2 it is as I said. It is impossible to ride robot that straight because it is too big. Here’s the parkour image
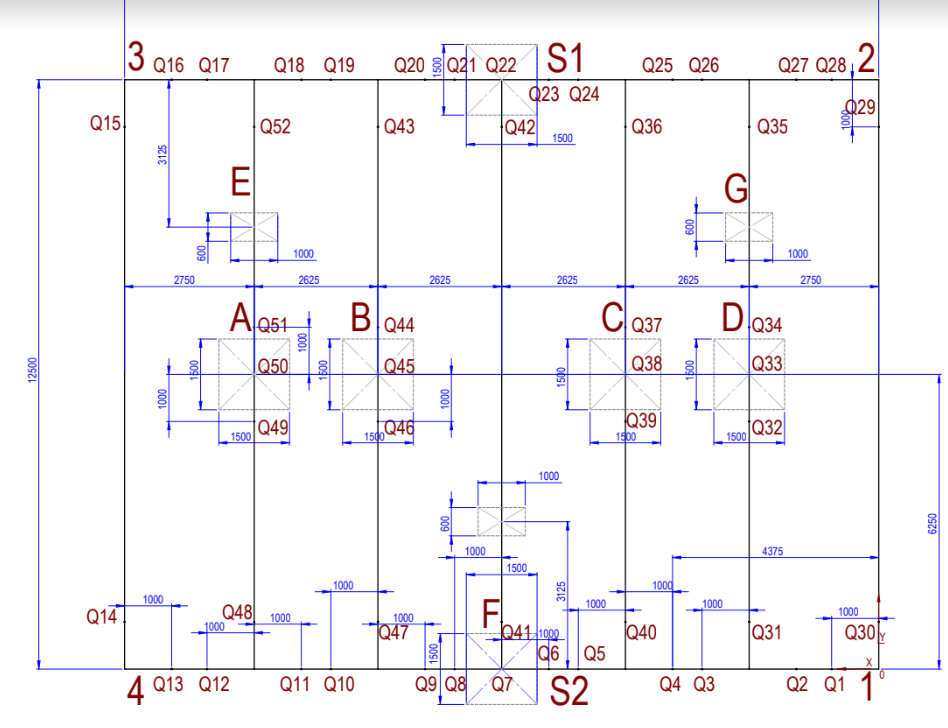
setNextTurn(0), Q24 and Q25 say setNextTurn(90). but the robot goes right as I said. We watched at pixy Mun but it never show right vector. We just see intersection and a vector that goes true way! We have limited time. If you’ll help today we will be too much happy. Sorry for bad grammar and thanks.
