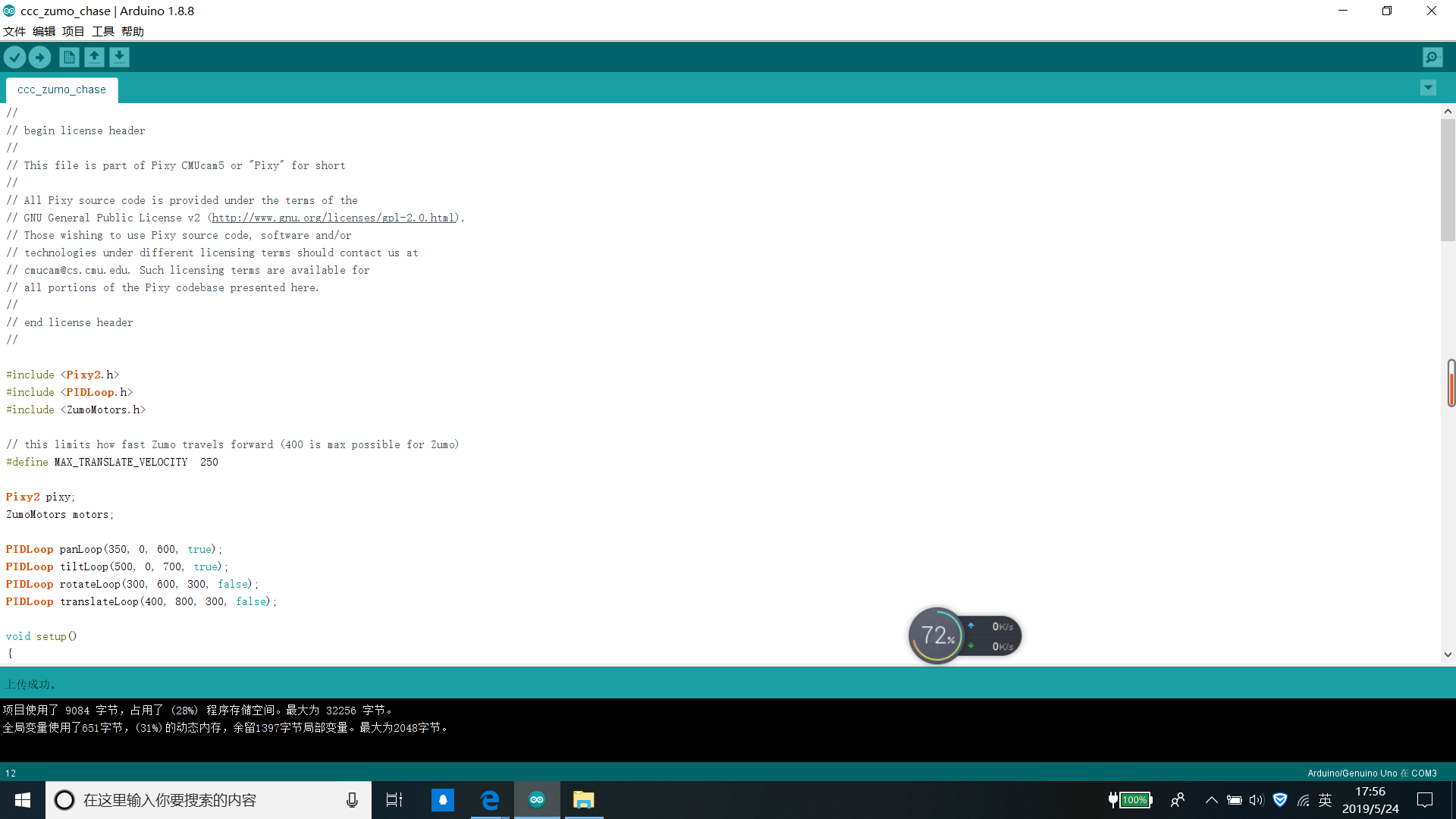
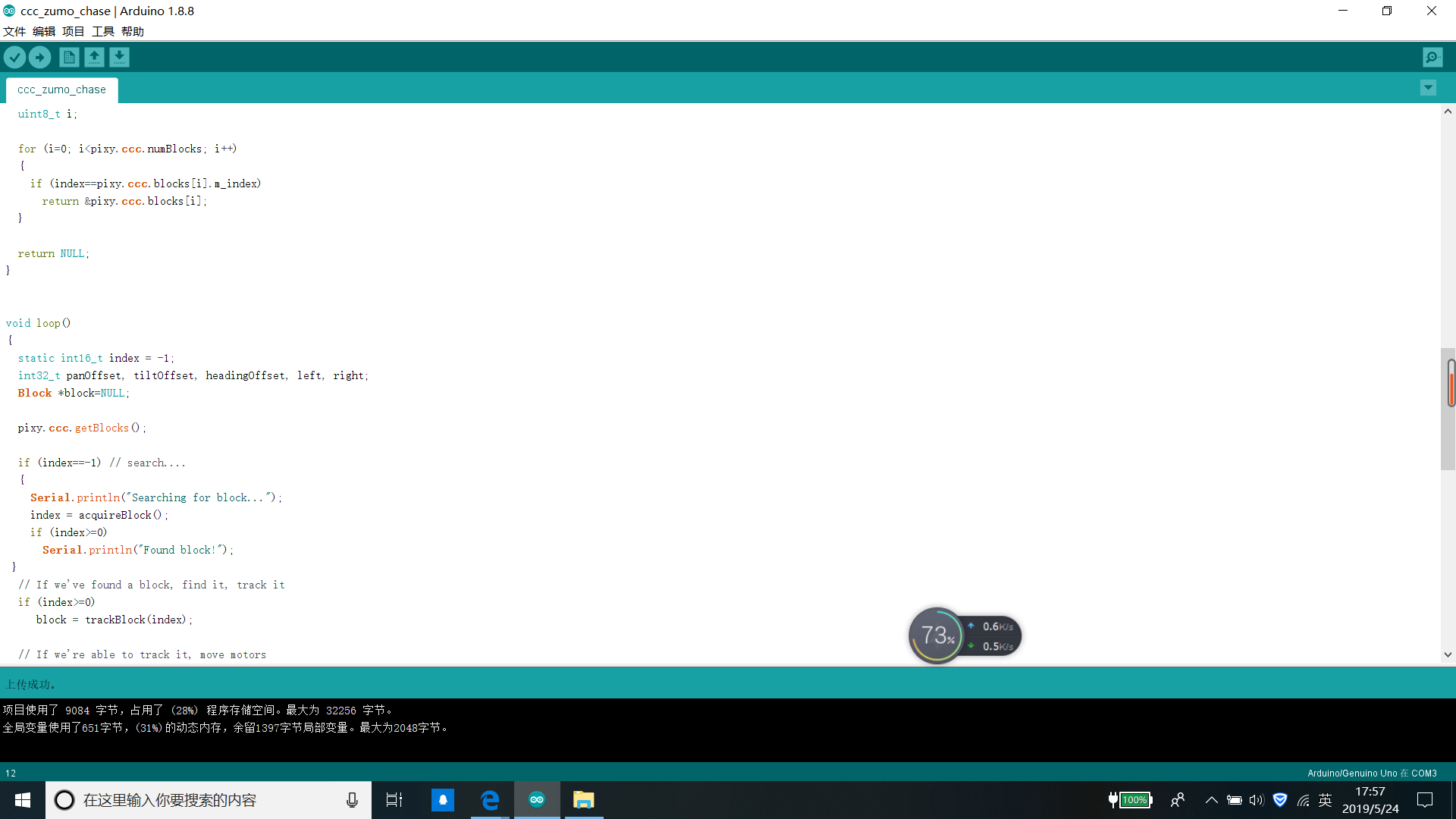
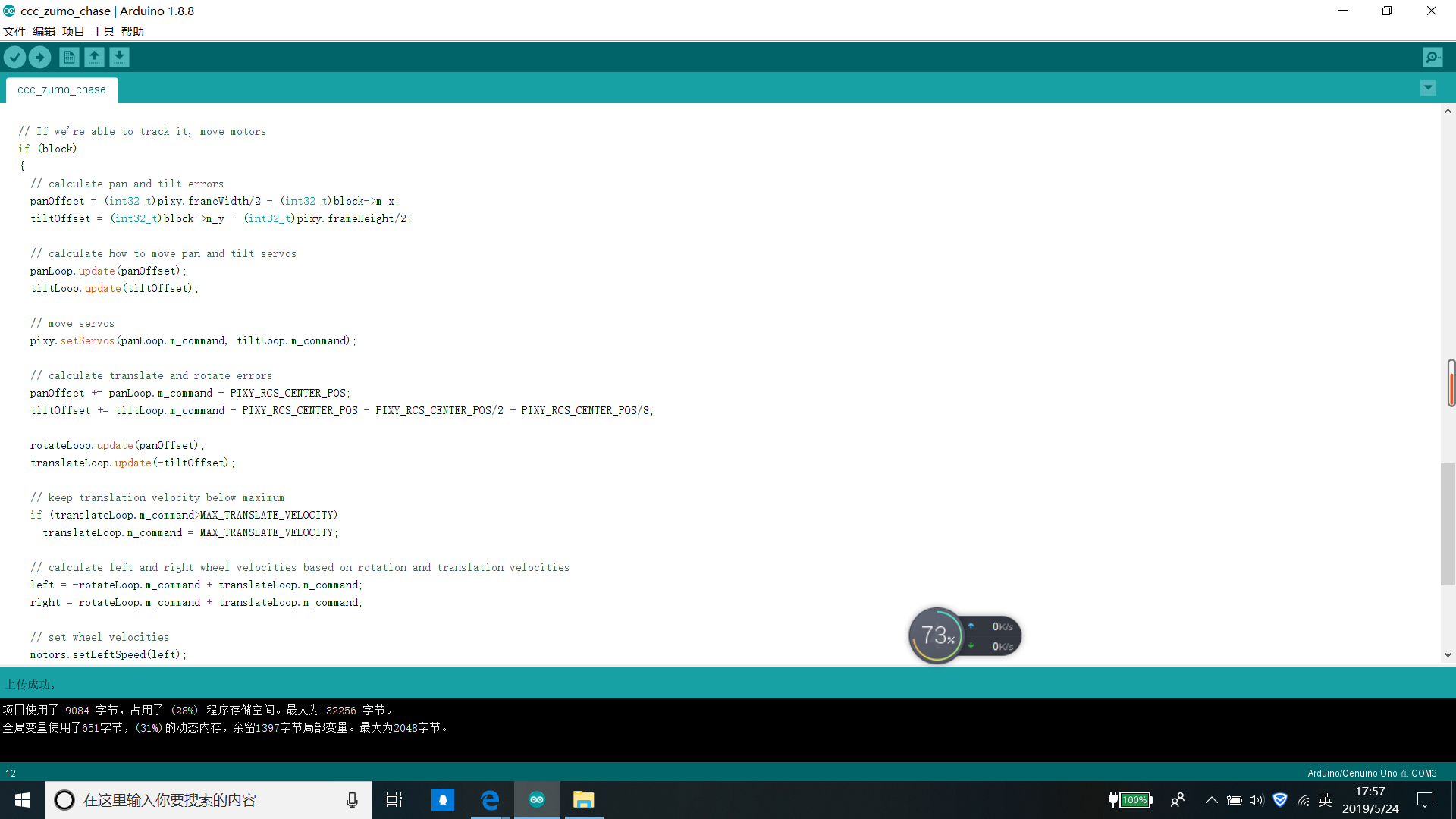
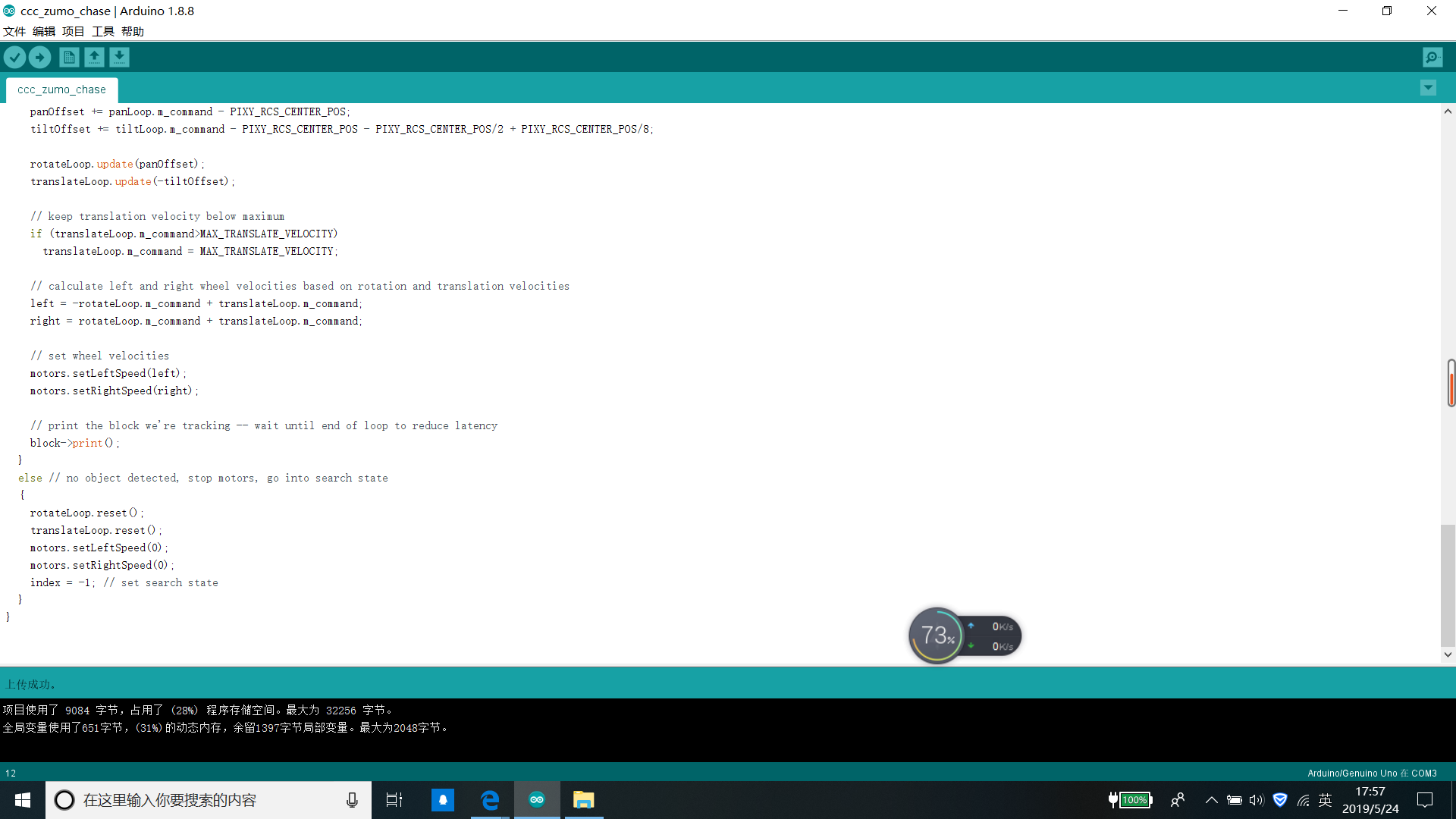
Recently i want to use the pixy2 to kick a ball,but the facility always keeps a distance from the ball.(using the code zumo demo_chase).I am wondering how the pixy2 judge the distance between the ball and itself? and how can i shorten the distance between the ball and the facility so that the zumo can touch the ball?
I would be appreciate if you can help me.Thank you for reading this letter!