Hi!
I am building a line following robot with pixy2 and arduino. In this project the line that the robot is supposed to follow is alone at some times and sometimes there are two extra identical lines that are parallel to the line I want the robot to follow.
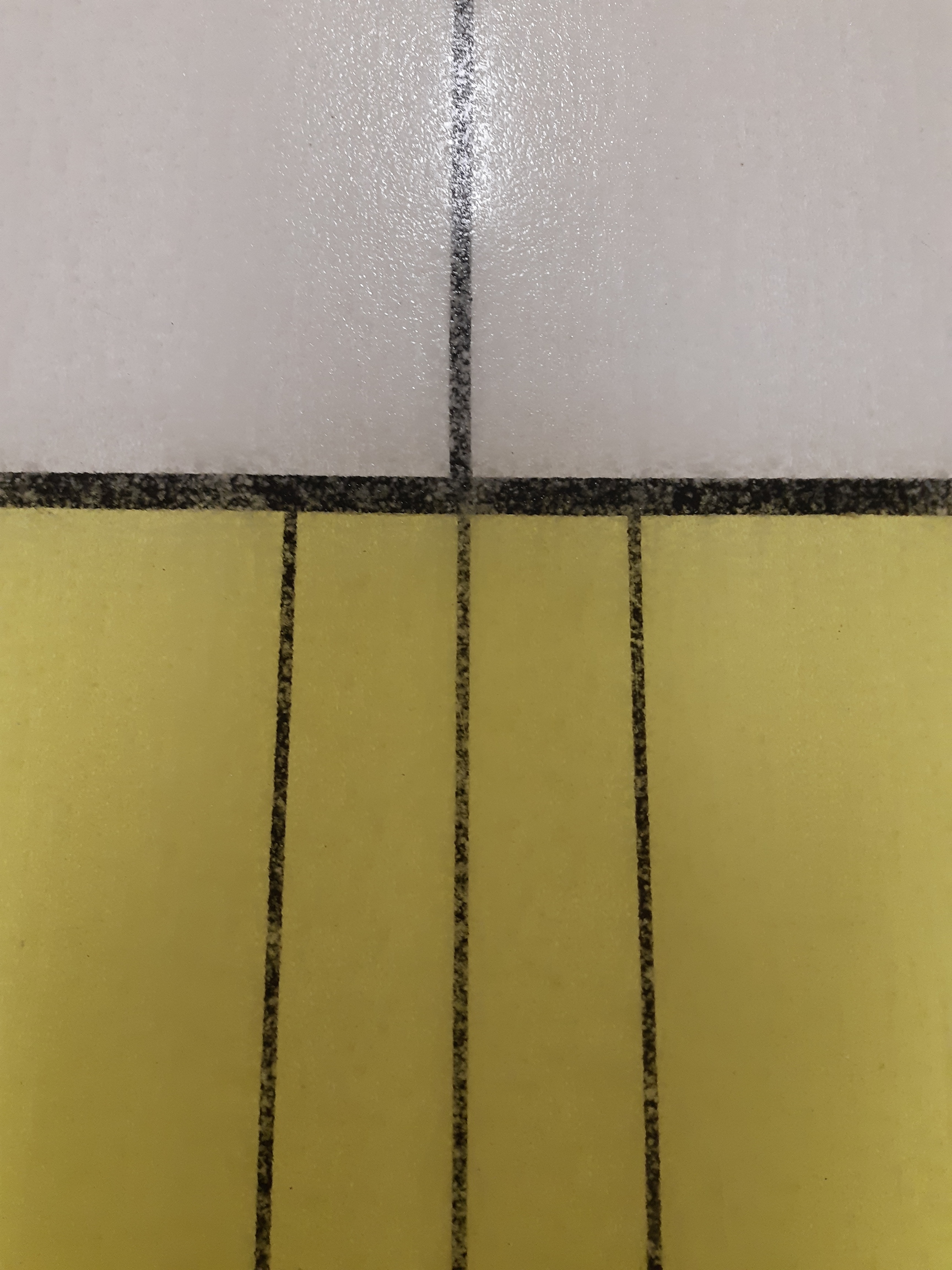
When there are only one line the robot tracks the line without a problem. However, when the two extra parallel lines appear the trouble begins. I want the robot to follow the line in the center of the three but sometimes the pixy2 chooses one of the other lines as the main vector. Is there any way to tell the pixy2 to always choose the line in the middle as it’s main vector?
Here is a picture of how the line looks.