
Hi ,I am trying to build a color following robot using pixy 2 with arduino.and a dual motor controller.
Is there any tutorial I could follow for this application?
Thank you.
Hello,
There is this tutorial:
https://docs.pixycam.com/wiki/doku.php?id=wiki:v2:pixy_zumo_howto
Hope this helps!
Edward
1 Like
Thank you very much, Edward
I appreciate your support.
Hi Edward
I am trying to get my dual motor robot to follow me using pixy2.
I will directly connect pixy 2 to my dual motor controller.
If I connect pin 6(GND), pin 8(DAC OUT), pin 1(GPIO0) to my dual motor controller, what can I read from pixy2 to make my robot to follow me?
Thank you.
Hello,
I don’t think you’ll be able to get it to work by connecting your motor controller directly to Pixy. You’ll need to have an Arduino (or similar) controller to calculate the motor commands based on what Pixy detects.
The ccc_zumo_chase example essentially does this. You might be able to use it for reference.
Edward
Hi, how are you?
I am trying to follow this tutorial to create my own following robot.
wiki:v2:pixy_zumo_howto [Documentation] (pixycam.com)
Instead of using zumo robot, I made my own so I want to try out with pixy2 and my dual motor controller using arduino’s zumo chase example sketch.
Could you tell me how to make the connection between pixy2 and arduino and my dual motor controller?
Please tell me what to connect so that I can test with my robot.
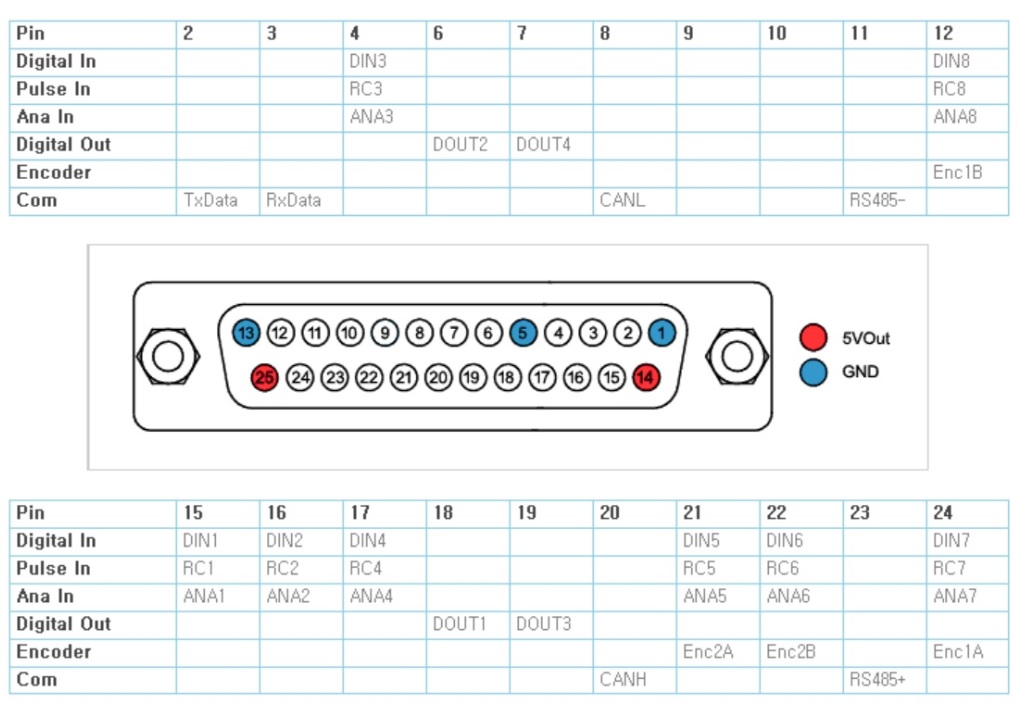
This is the pinout from my dual motor controller.
Thank you so much.
Hello,
We can’t help much with getting your Arduino connected to your motor controller, but if you want to connect your Pixy to your Arduino, please check out this page:
Edward