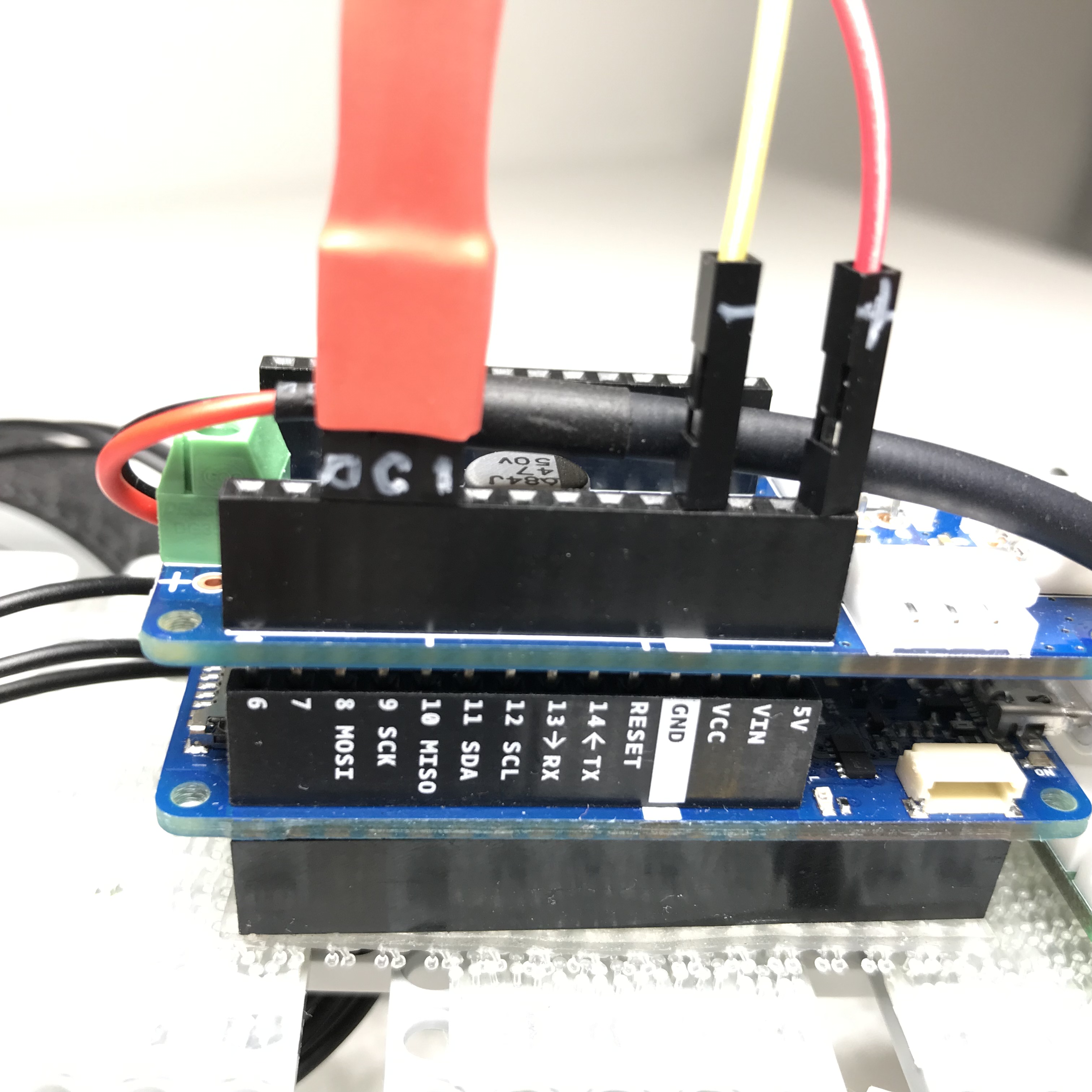
I am new to Pixy 2.1 and I am using it via SPI connections to the Arduino MKR ZERO, see picture below:
I had to make some custom jumper wires using Dupont connectors.
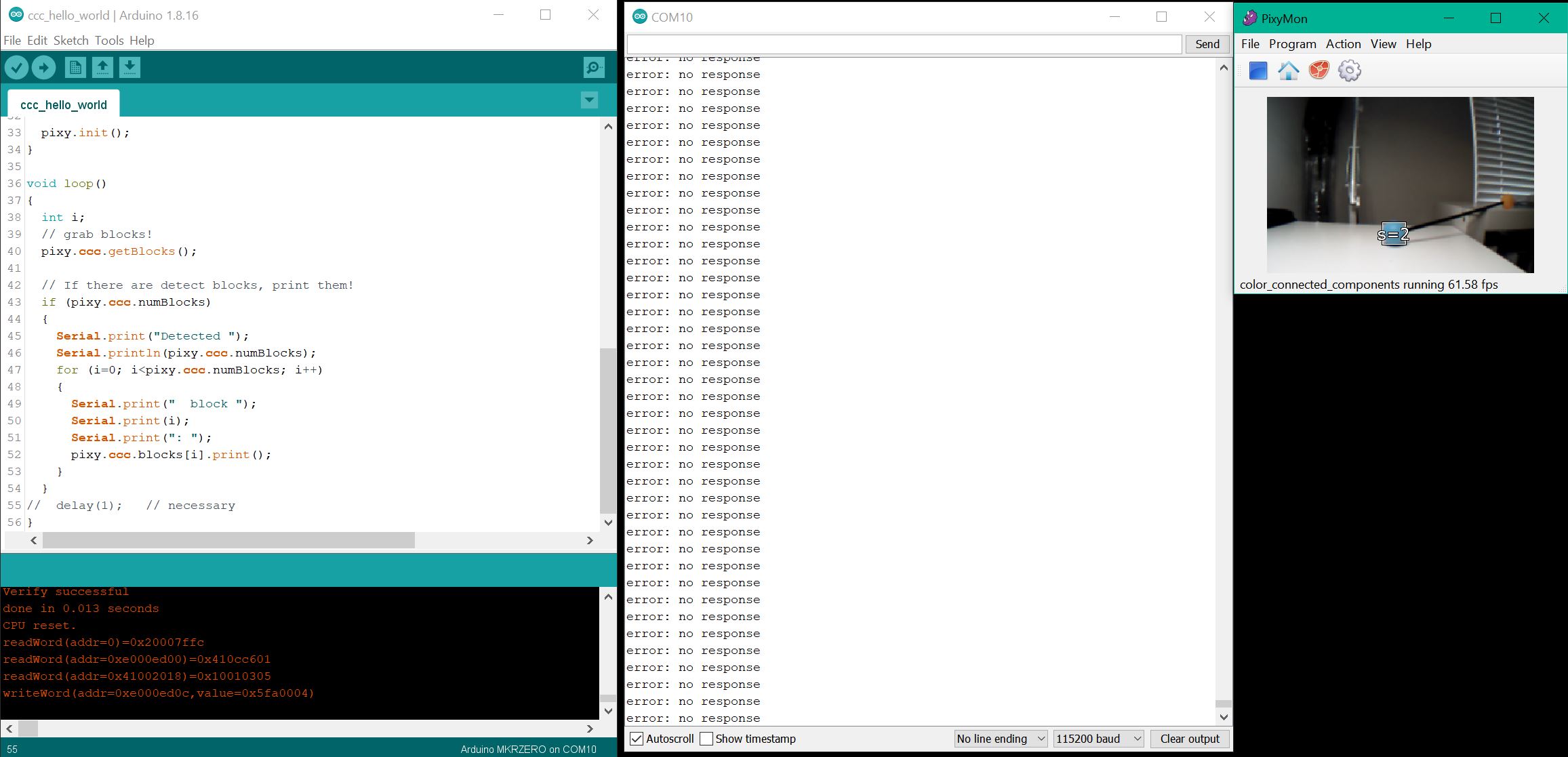
So far, I have only tested the example ccc_hello_world.ino, and I encountered a similar problem as previously reported here (Pixy2.1 alternates between no response error and actual data).
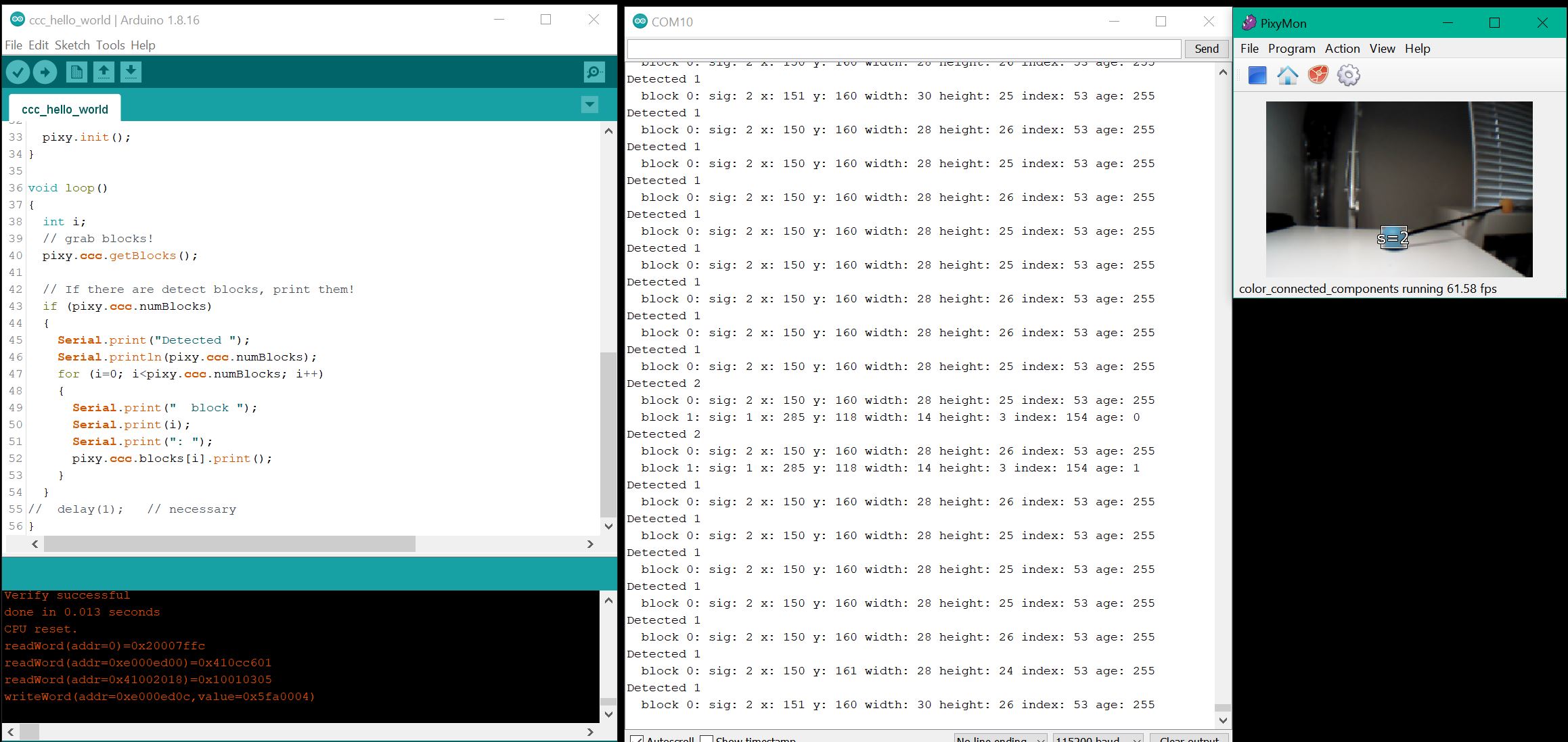
Fortunately, I have found a solution for it. Essentially, it looks like that the main loop needs to slow down a little bit as the MKR ZERO may be “faster” than the UNO: see the added line 55 in the picture below.
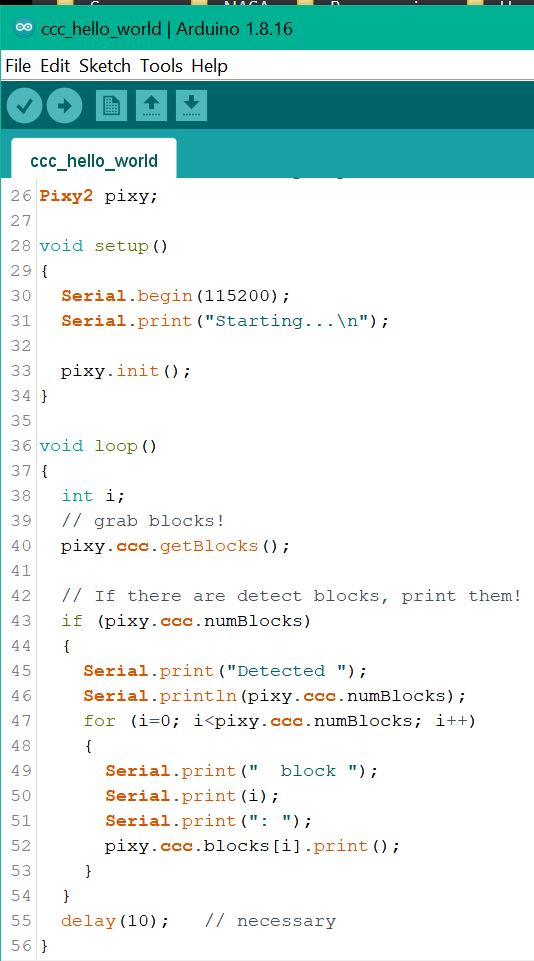
This small delay seemed to stabilize the data flow between the Pixy 2.1 and the MKR ZERO, so hopefully this will help future users.
However, I do have a question for Pixy Support: can I use 3.3 V (i.e. VCC) from the MKR ZERO to drive the Pixy 2.1? Or is that too low a Voltage Input for the Pixy 2.1 to work properly?
Thank you.